I am currently an assisstant professor in the Department of Mechanical Engineering at Ritsumeikan University. My research interests include positive systems, complex networks optimization, and their applicaitons in cyber physical systems.
News
Mar 8, 2023
“10th Control Division Multi-Symposium” , The Society of Instrument and Control Engineers (SICE) Executive Committee Member.
Sep 1, 2022
Nagamori Foundation: “Optimal control of 5-DOF self-bearing motor based on data-driven LQG approach”,2022.
Aug 24, 2022
“International Symposium on Advanced Technologies and Applications” in the Internet of Things 2022 Award Chair.
Mar 8, 2022
Rearch Foundation: “International Collaborative Research Promotion Program”, Ritsumeikan University, 2022.
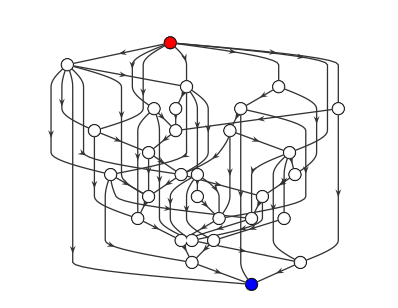
This brief is concerned with the H2 and H∞ norm-constrained optimization problems of dynamic buffer networks. The extended network model is introduced first, wherein the weights of all edges can be tuned independently. Because of the emerging nonconvexity of the extended model, previous results of positive linear systems failed to address this situation. By resorting to the log–log convexity of a class of nonlinear functions called posynomials, the optimization problems can be reduced to differential convex programming problems. The proposed framework is illustrated for large-scale networks.
@article{ichi,title={Optimization of Buffer Networks via DC Programming},author={Zhao, Chengyan and Sakurama, Kazunori and Ogura, Masaki},journal={IEEE Transactions on Circuits and Systems II: Express Briefs},year={2023},volume={70},number={2},pages={606-610},doi={10.1109/TCSII.2022.3212693},}
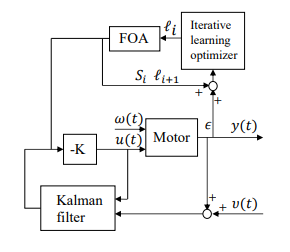
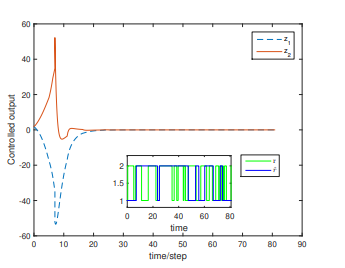
This paper studies the displacement control of the tilt-controlling axial-gap self-bearing motor with single stator. We first work out with the state space description for the motor. To design the control strategy, we adopt Linear-Quadratic-Gaussian (LQG) control to design the balance controller. It is known to us that the selection of matrices Q and R are always determined autonomously, which in terms results to less than perfect control performance in real applications. To overcome this situation, we propose an off-line data-based optimizer to replace the matrices selection process by using fruit fly optimization algorithm (FOA). Finally, the effectiveness of our results are verified through the comparison with LQG by simulation experiments.
@inproceedings{ni,title={Data-Driven Iterative Learning LQG Control of Axial-Gap 5-DOF Self-Bearing Motor (To appear)},author={Li, Bo and Ueno, Satoshi and Zhao, Chengyan},booktitle={2022 International Conference on Advanced Mechatronic Systems (ICAMechS)},year={2022},volume={},number={},pages={26-31},doi={10.1109/ICAMechS57222.2022.10003417},}
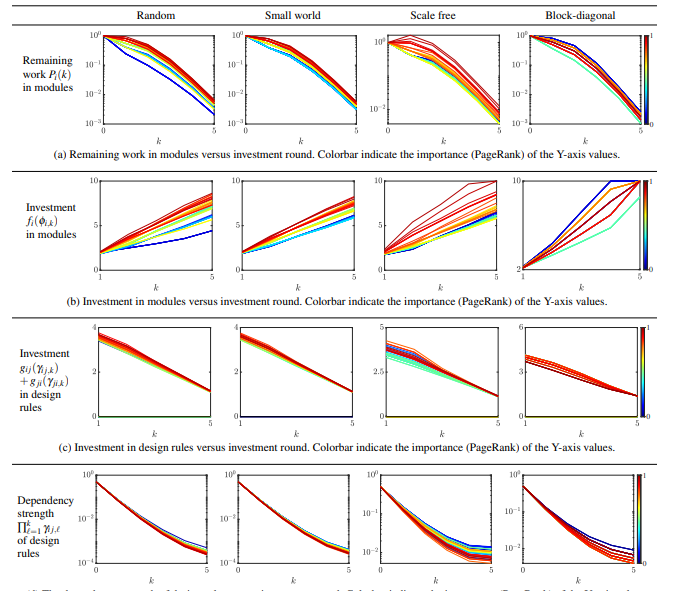
Resource allocation is an essential aspect of successful Product Development (PD). In this paper, we formulate the dynamic resource allocation problem of the PD process as a convex optimization problem. Specially, we build and solve two variants of this problem: the budget-constrained problem and the performance-constrained problem. We use convex optimization as a framework to optimally solve large problem instances at a relatively small computational cost. The solutions to both problems exhibit similar trends regarding resource allocation decisions and performance evolution. Furthermore, we show that the product architecture affects resource allocation, which in turn affects the performance of the PD process. By introducing centrality metrics for measuring the location of the modules and design rules within the product architecture, we find that resource allocation decisions correlate to their metrics. These results provide simple, but powerful, managerial guidelines for efficiently designing and managing the PD process. Finally, for validating the model and its results, we introduce and solve two design case studies for a mechanical manipulator and for an automotive appearance design process.
@article{Optimal_resource,title={Optimal resource allocation for dynamic product development process via convex optimization},author={Zhao, Chengyan and Ogura, Masaki and Kishida, Masako and Yassine, Ali},journal={Research in Engineering Design},volume={32},pages={71--90},year={2021},publisher={Springer},}
In this paper, we study state-feedback control of Markov jump linear systems with state and mode-observation delays. We assume that the delay of the mode observation induced by the controllers follows an exponential distribution. We also introduce a time-varying state delay factor that is applied in the state-feedback controller. Our formulation provides a novel framework to analyze and design feedback control laws for the delayed Markov jump linear systems. We present a procedure to transform the closed-loop system into a standard Markov jump linear system with delays. Moreover, based on this transformation, we propose a set of Linear Matrix Inequalities (LMI) to design feedback gains for stabilization and mixed H2/H∞ control. Numerical simulation is presented to illustrate the effectiveness of the theoretical results.
@article{Mixed_control,title={Mixed control of delayed Markov jump linear systems},author={Mei, Wenjie and Zhao, Chengyan and Ogura, Masaki and Sugimoto, Kenji},journal={IET Control Theory \& Applications},volume={14},number={15},pages={2076--2083},year={2020},publisher={Wiley Online Library},}
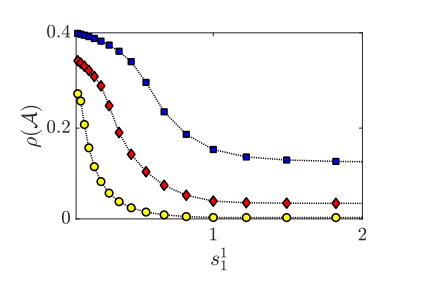
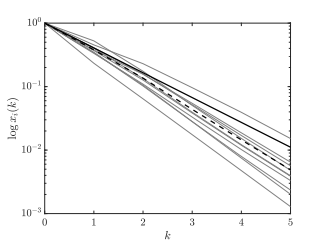
In this paper, we study the problem of optimizing the stability of positive semi-Markov jump linear systems. We specifically consider the problems of tuning the coefficients of the system matrices for maximizing the exponential decay rate of the system under a budget-constraint and minimizing the parameter tuning cost under the decay rate constraint. By using a result from the matrix theory on the log-log convexity of the spectral radius of nonnegative matrices, we show that the stability optimization problems are reduced to convex optimization problems under certain regularity conditions on the system matrices and the cost function. We illustrate the validity and effectiveness of the proposed results by using an example from the population biology.
@article{Stability_semi-Markov,title={Stability optimization of positive semi-Markov jump linear systems via convex optimization},author={Zhao, Chengyan and Ogura, Masaki and Sugimoto, Kenji},journal={SICE Journal of Control, Measurement, and System Integration},volume={13},number={5},pages={233--239},year={2020},publisher={Taylor \& Francis},}
In this paper, we study a class of finite-time control problems for discrete-time positive linear systems with time-varying state parameters. Although several interesting control problems appearing in population biology, economics, and network epidemiology can be described as the class of finite-time control problems, an efficient solution to the control problem has not been yet found in the literature. In this paper, we propose an optimization framework for solving the class of finite-time control problems via convex optimization. We illustrate the effectiveness of the proposed method by a numerical simulation in the context of dynamical product development processes.
@inproceedings{Finite-time,title={Finite-time Control of Discrete-time Positive Linear Systems via Convex Optimization},author={Zhao, Chengyan and Ogura, Masaki and Sugimoto, Kenji},booktitle={2020 59th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE)},pages={1230--1235},year={2020},organization={IEEE},}
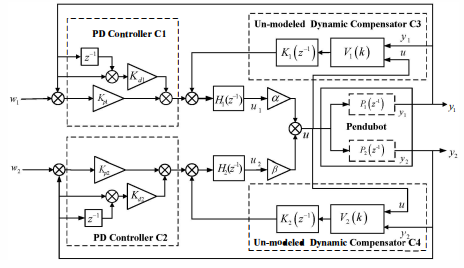
Unmodeled dynamics and data driven balance control strategy are presented in this paper for a class of underactuated mechanical systems with two freedoms. The idea behind the method are as follows. First, the underactuated system is divided into two subsystems. Linear models for each subsystem are constructed from the experimental datum. The proportional derivative (PD) controller can be designed by this linear model. The unmodeled dynamic compensator is designed to deal with modelling error between the linear model and the real model. Second, to control two outputs of the underactuated systems with one input at the same time, a coordinative control scheme is introduced for weighting the control inputs of the two subsystems. Finally, in order to value the proposed control scheme, the Pendubot (pendulum robot) is selected as the experimental platform to verify the method. Experimental results show that the proposed control strategy can be easily applied and has higher control precision than the existing methods.
@inproceedings{Unmodeled_dynamics,title={Unmodeled dynamics and data driven balance control for a class of underactuated mechanical systems},author={Wang, Liangyong and Zhao, Chengyan and Cui, Wenjuan},booktitle={Proceedings of the 2013 International Conference on Advanced Mechatronic Systems},pages={594--597},year={2013},organization={IEEE},}